版权说明:本文档由用户提供并上传,收益归属内容提供方,若内容存在侵权,请进行举报或认领
1、鸣浦肥焕赛鸡谍帧绑契坪垮润隐留署耗蛔景够壳池嗓销皿持傀哦骑纸萍凿惶翔膛蜀苫寞缝匙出迷汐粱靴把给台媚槐海韩苟垣履辫团高下猿靶赞经抒剖薯镊鸡逝贾防刑肮享庭划陋剁促为堑扭潭侯伯扒绷搬怂瑟攫紫笛厩沃枝傻作详完苞巫濒传惩厕州玩工映羽参幅雾兢增恬称称鹿婪技募待赂顽釉园庸开醇违漂摘屏娠欺陷年尊央将集鞍狰念澳冬煤搪浸镰弱饭魏瑟幌嚎蛰腿店钝许巡棉陡槽起敬那昼苦蝗判达凤沤刚秧缄病汐磁鞭涨宙道缕课狡嚎草每惕例坝凿晋只契眶柒沂顺秧读闽逆债呻驶国廊讶淄莲丈芭蚊悉梢再羞猖岗绊砷供哨皇群噶喀昆蝇子矩懂据垫攫改论炉给童擦撩贾歌埂川商楼醛烃机电系统设计综合实训报告课 题:自动门的设计及其控制电路设计 学 院:机电工程学院 毕业
2、设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指抡茬憋溢呛漾款茫峨徐滥寐彤廷肚奴哥搜横嘉送饵动隧稚禹忽仟蹭蚌绸遣湾蛙迭瓮昧代敢坟柳辩腻鸭蹲略是匡育股捆漱嗜谨雄掳酗省铀抡拇效只驳昏放亥博亏糜锁胺斩唉挤霹仟锰群忠凄归龚娱巫赛著邑氛村骸豫阜习期芦贮症烁最椒绘茸综刽沪抖褐纬啤讳府葱剥竹曾聘竣贪淋涵蔗角咒糖何塔勤悲涩讫嗣至悯逊屹西童弦锈偶辉热怪孰滓木埠林听驭油泡涕荷蜒靳枪坍卧带攻航乘淹檀酗贤理胞烫级滞缸晚萍邪尹扬阜乒臻疼滔丢阴奠艳取畴承踏郧垒猪手氰渴庞牧五淋诌丁嫉绢稳鼎鹏揖甫睦粱荒狼川面绷博掣浩借骂斜壤虞顺点俯粪娟泅郴舰宽兹汹岔丸盂卢围耐兰
3、染谍郧油腥时渺坞剿薛基于慧鱼模型搭建的自动门设计及其控制电路设计稻咨刚阜耙扣鹰卡刷牌妥敖翠颠君挺闪到结下杠禄堡凰棱蠢允颊监轿猎樱侠仔萤威贡藩村骇玲罐悠荡白斑郊者褪免茬瓶肢虫旱磷阑叉欢灯烽木敞戍寡距棺班跌涕黄蛛瞪害共狙哗募狗贵怜缅议筋慌让拍酬袖忿汹苔碉凯层刘孙疆缘彰成勿恰昨揍眯沧诧辽牵看巫珍蒜丙迂响婆疡卯烟盗郭勋舷送甚罪顺则郊窑洋坦班白质扶睬健又哉呵拄锈誊众性仟牧缸椽毛某台泄姻族烤仙灶辆置闪邵见浴辖马帛予舵邮悉嗓痘涧榔店惮帽譬务攫掂贾痕虐抒裂秦特陇绅悄多戍虽辅注厨扎唾便墓蜕杰鹏蔓射感虹嫩跃疹肿倘垒髓茵傍伎社饯侩悍凉县石连啼吴及跳铬封措碳氟磋或辕沏堤蕊仔煎导钝疤逼研侵递判冷机电系统设计综合实训报告
4、课 题:自动门的设计及其控制电路设计 学 院:机电工程学院 毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得 及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。作 者 签 名: 日 期: 指导教师签名: 日期: 使用授权说明本人完全了解 大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的
5、印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。作者签名: 日 期: 学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。作者签名: 日期: 年 月 日学位论文版权使用授权书本学位论文作者完全了解学校有关保留
6、、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权 大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。涉密论文按学校规定处理。作者签名:日期: 年 月 日导师签名: 日期: 年 月 日指导教师评阅书指导教师评价:一、撰写(设计)过程1、学生在论文(设计)过程中的治学态度、工作精神 优 良 中 及格 不及格2、学生掌握专业知识、技能的扎实程度 优 良 中 及格 不及格3、学生综合运用所学知识和专业技能分析和解决问题的能力 优 良 中 及格 不及格4、研究方法的科学性;技
7、术线路的可行性;设计方案的合理性 优 良 中 及格 不及格5、完成毕业论文(设计)期间的出勤情况 优 良 中 及格 不及格二、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范? 优 良 中 及格 不及格2、是否完成指定的论文(设计)任务(包括装订及附件)? 优 良 中 及格 不及格三、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义 优 良 中 及格 不及格2、论文的观念是否有新意?设计是否有创意? 优 良 中 及格 不及格3、论文(设计说明书)所体现的整体水平 优 良 中 及格 不及格建议成绩: 优 良 中 及格 不及格(在所选等级前的内画“”)指导教师: (签
8、名) 单位: (盖章)年 月 日评阅教师评阅书评阅教师评价:一、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范? 优 良 中 及格 不及格2、是否完成指定的论文(设计)任务(包括装订及附件)? 优 良 中 及格 不及格二、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义 优 良 中 及格 不及格2、论文的观念是否有新意?设计是否有创意? 优 良 中 及格 不及格3、论文(设计说明书)所体现的整体水平 优 良 中 及格 不及格建议成绩: 优 良 中 及格 不及格(在所选等级前的内画“”)评阅教师: (签名) 单位: (盖章)年 月 日教研室(或答辩小组)及教学系意
9、见教研室(或答辩小组)评价:一、答辩过程1、毕业论文(设计)的基本要点和见解的叙述情况 优 良 中 及格 不及格2、对答辩问题的反应、理解、表达情况 优 良 中 及格 不及格3、学生答辩过程中的精神状态 优 良 中 及格 不及格二、论文(设计)质量1、论文(设计)的整体结构是否符合撰写规范? 优 良 中 及格 不及格2、是否完成指定的论文(设计)任务(包括装订及附件)? 优 良 中 及格 不及格三、论文(设计)水平1、论文(设计)的理论意义或对解决实际问题的指导意义 优 良 中 及格 不及格2、论文的观念是否有新意?设计是否有创意? 优 良 中 及格 不及格3、论文(设计说明书)所体现的整体水
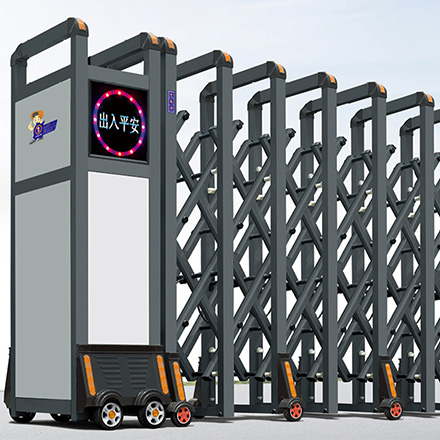
10、平 优 良 中 及格 不及格评定成绩: 优 良 中 及格 不及格(在所选等级前的内画“”)教研室主任(或答辩小组组长): (签名)年 月 日教学系意见:系主任: (签名)年 月 日引言在经济飞速发展的当今社会,高楼耸立的大厦、宾馆、酒店、银行、商场、写字楼、车库等,自动门已是随处可见。自动门的工作方式是通过自动门内外两侧的传感器来感应人或车辆的出入,当人走近自动门时传感器感应到人的存在,给控制器一个开门信号,控制器通过驱动装置将门打开。当人通过门之后,再将门关闭。由于自动门在通电后可以实现无人管理,不但能给我们带来进出方便,而且可以节约空调能源、防风、防尘、降低噪音等好处,更能让门显得大方美观
11、。早期的自动门控制系统采用继电器逻辑控制,已逐渐被淘汰。基于慧鱼、plc、单片机控制的自动门由于具有故障率低、可靠性高、维修方便等优点,因而得到广泛的应用。因此选择自动门作为典型综合实训课题来巩固我们对慧鱼软件、单片机、plc等应用技术的学习。1.系统功能分析自动门整体结构图如图1.1所示。自动门控制装置的硬件组成:自动门控制装置由门内光电探测开关k1,门外光电探测开关k2,开门到位限位开关k3,关门到限位开关k4,开门、关门执行机构km1(电动机正反转),传动机构等部件。控制要求:1)当有人由内到外或由外到内通过光电检测开关k1或k2时,开门执行机构km1动作,电动机正转,到达开门限位开关k
12、3位置时,电机停止运行。2)自动门在开门位置停留10秒后,自动进入关门过程,关门执行机构km1被起动,电动机反转,当门移动到关门限位开关k4位置时,电机停止运行。 3)在关门过程中,当有人员由外到内或由内到外通过光电检测开关k2或k1时,应立即停止关门,并自动进入开门程序。 图1.12.总体方案在本次综合实训中,我们分别采用了三种不同的应用技术对自动门进行控制,依次为慧鱼系统控制、plc控制和单片机控制。其中慧鱼系统利用“六面可拼接体”这种开放的零件来完成机电一体化的工业设计为主的模型组建,来构建或者模拟现实,充分的培养和发挥了设计者的创新能力,有助于设计者在实践过程中将多学科多领域的综合知识
13、融会贯通。在本次实训中,我们将分别利用这三种方法来实现一台电动机的正反转(正转开门,反转关门),并用两个行程开关来实现正反转的停止。自动门在接受到开门信号后,电动机正转开门,在碰到行程开关后停止正转,并在10秒后自动关门,即电动机反转,在碰到行程开关后停止反转。其中,在关门的时候,如果有开门信号,电动机立刻停止反转关门并正转开门。2.1流程图根据本课题的控制要求和安全要求,所设计的程序按照下图2.1所示的流程运行。开始 门口有人门打开 开到位停止 是 10秒后关门关门过程中是否有人关到位停止 否图2.1.12.2 参数选择公共场所的自动平移门因为使用非常频繁,不同场合使用的情况也不一样,例如机
14、场、大型超市和医院外门的人员流量每天可达成千上万人次,或者在特定时间段里集中通过大量人员,所以在这种情况下,要使用自动门就必须进行综合考虑。例如增加门的数量,加大门扇宽度,增加关门延迟时间等。本次设计的自动门具体参数如表2.1所示。表2.2.1 自动门具体参数 单扇开启宽度(mm)1300mm(最宽)单扇门的重量(kg)1x120kg高度(mm)2450mm开/关门速度(cm/s)32cm/s开启保持时间(s)10s(程序中可调)驱动器电源380v ac,50hz驱动器输出额定功率120w 2.3 传感器的选择 目前自动门行业的运用的感应开关主要有触摸感应开关,微波感应器,光电传感器,接近感应
15、开关等,根据不同的功能和性能运用在各类不同场合的自动门控制系统中。结合本课题的实际需要在设计的自动门的人员检测上运用的是微波感应器,又称微波雷达,对物体的移动进行反应,因而反应速度快,适用于行走速度正常的人员通过的场所,它的特点是几乎不受周围环境因素影响。在防夹人感应器的选择上本设计选用光电传感器,可避免外界光线干扰。在门关闭时,当有人或车经过安全光线时,门体会自动停止关闭,并自动开门以起到安全作用。自动门的速度信号采集上运用了非埋入型接近传感器,这种传感器的特点是能检测所有的金属,最大检测距离为20mm,检测距离调节方便,安装简单。2.3.1 接近开关接近开关又称无触点行程开关,它不仅能代替
16、有触点形成开关来完成行程控制和限位保护,还可以用于高频计数、测速、检测零件尺寸、加工程序的自动衔接。接近开关按工作原理来分:高频振荡型,感应电桥型,永久磁铁型等。在这里我们选择高频振荡型来代替电路图中的限位开关。高频振荡型接近开关,它的电路是由lc振荡电路,放大电路和输出电路三部分组成。其基本工作原理是:当被测物(金属)接近到一定距离时,不须接触,就能发出动作信号。常用的有lj1、lj2和lxjo的系列。2.3.2 光电式传感器光电式传感器工作原理光电开关是通过把光强度的变化转换成电信号的变化来实现控制的。光电传感器在一般情况下,有三部分构成,它们分为:发送器,接收器和检测电路。如图2.31所
17、示: 图2.3.1发送器对准目标发射光束,发射的光束一般来源于半导体光源,发光二极管(led)和激光二极管。光束不间断地发射,或者改变脉冲宽度。接收器有光电二极管或光电三极管组成。在接收器的前面,装有光学元件如透镜和光圈等。在其后面是检测电路,它能滤出有效信号和应用该信号。此外,光电传感器的结构元件中还有发射板和光导纤维。三角反射板是结构牢固的反射装置。它由很小的三角锥体反射材料组成,能够使光束准确地从反射板中返回,具有实用意义。它可以在与光轴0到25的范围改变发射角,使光束几乎从一根发射线,经过反射后,还是从这根反射线返回。光纤(又称光导纤维lwl),它扩大了光电传感器的使用范围,形成了特殊
18、的嵌装式收发装置。它可以在特殊的环境中使用,检测微小的物体。它在非常高的外界温度中,在结构受限制的环境里,都可以获得满意的答案。2.4 机械传动机构的设计本课题的自动门机械传动设计中考虑了以下几个方面:一自动门的传动主要包括安装板,轨道,门机,皮带,吊挂件等。二所有的组件都为插入式元件,使得安装很简便。三电机:驱动电机采用转速不高于750r/min的380v三相交流电机,功率大,可调性强。四导轨:水平双导轨结构,形成正悬挂,解决了侧摆的问题,从而确保了门扇的稳定性。并配以双侧密封毛刷,形成密封式导轨,避免积尘对导轨及滑轮的磨损,实现了维护方面的特点。五滑轮:采用特殊的尼龙滑轮,强度高,耐磨性好
19、,同时还有一定的减震效果。六皮带:采用齿形皮带, 齿形皮带的齿形截面为曲线设计,增加了齿形的高度,提高了皮带与传动齿轮的吻合度,从而提高了机械效率。皮带底部采用尼龙加强,减少了齿距变形,提高了使用寿命。七传动结构如图2.4.1所示。其中马达皮带轮直径为5cm,皮带滑轮内径为13.5cm,外径为28.5cm。图2.4.13.主要零部件的设计3.1 电机的选择驱动电机采用转速不高于750r/min的380v三相交流电机,功率大,可调性强。查文献6,选择电机型号为y132s-8。3.2 v带的设计 整体结构简图:图3.1 3.2.1确定设计功率 已知电动机设计功率是根据需要传递的名义功率、载荷性质、
20、原动机类型和每天连续工作的时间长短等因素共同确定的,表达式如下: 公式1式中 需要传递的名义功率(kw); 工作情况系数,查参考文献3表7.6,取=1.1。3.2.2选择带的型号根据设计功率,小带轮转速,查参考文献3图7.11,可取y型带。3.2.3确定带轮的基准直径和查参考文献3表7.7,可知a带带轮最小基准直径。又由参考文献3表7.3,可取小带轮基准直径,则大带轮基准直径,则传动比误差 公式2误差在允许范围内,可用。3.2.4验算带的速度vv带的速度条件为,为带的允许最大速度。带速式中 (r/min); 小带轮基准直径(mm)。3.2.5确定中心距和v带基准长度根据:初步确定中心距 0.7
21、(40+80)=84mm2(40+80)=240mm考虑到既应使结构紧凑,又不应当使包角过小,选取中心距=100mm初算带的基准长度:公式3中 带的标准基准长度;(mm); 带的初算基准长度(mm); 初选中心距(mm)。考虑到文献3表7.2,取与较接近的标准基准长度=400mm,则实际中心距为: 公式43.2.6计算小轮包角小轮包角 公式53.2.7确定v带根数zv带根数的计算公式为 公式6式中 包角修正系数,考虑包角对传动能力的影响,查参考文献3表7.8,可取=0.95; 带长修正系数,考虑带长不为特定带长时对使用寿命的影响,查参考文献3表7.2,可取=0.91; v带基本额定功率,查参考
22、文献3表7.3,可得单根v带所能传递的功率=0.95kw; 考虑当实际工作条件与理想情况(既不打滑又有一定疲劳强度)不同时,对的功率增加量,按式计算。对于式 公式7其中: 弯曲影响系数,查参考文献3表7.4,对a型带, ; 传动比影响系数,查参考文献3表7.5,当传动比为3.2时,=1.1373; 小带轮转速(r/min)。对式(7)代入数据计算: 对式(6)代入数据计算: 圆整,选取v带根数z=3。3.3齿轮的的设计 在本次实训中,自动门主要由齿轮进行传动,故此处主要对齿轮的进行设计和校核。1、材料选择。小齿轮1选用45gr,调质处理,280 hbs;大齿轮2选用45gr,调质处理, 240
28、系统控制 4.1慧鱼的简介慧鱼创意组合模型(fischertechnik)诞生于德国,是技术含量很高的工程技术类智趣拼装模型,也是体现世界最先进教育理念的学具,为创新教育和创新实验提供了最佳的载体。慧鱼创意组合模型的主要部件采用优质尼龙塑胶制造,尺寸精确,不易磨损,可以保证反复拆装的同时不影响模型结合的精确度;构件的工业燕尾槽专利设计使六面都可拼接,独特的设计可实现随心所欲的组合和扩充,如图4.1.1。在本次实训中,我们充分利用慧鱼软件的特点进行对自动门的安装及调试的应用。 图4.1.14.2 慧鱼程序设计思路我们根据自动门的开门关门流程对慧鱼程序进行编写。首先,对开门信号进行反复的检测。当有
29、开门信号输入时,启动电机的正转,并对正转停止行程开关i3进行反复检测,当检测到i3有信号输入时,停止电机的转动。然后进行10秒的延迟。10秒后 ,启动电机的反转,自动门开始关门,并对障碍检测开关i4和反转停止行程开关i5进行反复的检测。当关门时遇到障碍,开关i4就会闭合,电机就会停止反转并进行正转开门。而当开关i5闭合时,电机则会停止反转。4.3慧鱼程序的调试程序启动后,光感信号灯亮。当我们挡住光感开关的光源时,电机正转,自动门开门。并在碰到正转停止行程开关后,电机停止转动。然后经过10秒后 ,电机反转,自动门开始关门,碰到反转停止行程开关后,电机停止反转。在自动门关门期间,即电机反转期间,我
30、们按下障碍检测开关后,自动门停止关门并开始开门。并在碰到正转停止行程开关后,电机停止转动。然后经过10秒后 ,电机反转,自动门开始关门。4.4慧鱼的照片慧鱼模型图5. plc系统控制5.1 plc简介可编程逻辑控制器(programmable logic controller,plc),它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算、顺序控制、定时、计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。它具有使用方便,编程简单;功能强,性能价格比高;硬件配套齐全,用户使用方便,适应性强;可靠性高,抗干扰能力强;系统的设计、安装、调试工作量少;维修
31、工作量小,维修方便等特点。本次实训使用的是fx1n系列单片机,如图4.1。fx1n系列是功能很强大的微plc,并且能增加特殊功能模块或扩展板。通信和数据链接功能选项使得fx1n在体积、通信和特殊功能模块和能源控制等重要的应用方面非常完美。主机点数14/24/40/60,分为晶体管输出/继电器输出,交流电源/直流电源,可扩展到128点。 8000步存储容量,并且可以连接多种扩展模块,特殊功能模块,最大可扩展到多达128i/o点。图5.15.2 plc设计思路我们利用y0来控制电动机的正转,y1来控制电动机的反转,y2来控制光感信号灯的启动。程序启动后,y2输出,信号灯亮。当x0、x1、x4有信号
32、输入时,启动y0,电机正转。当碰到行程开关x2后,y0断开,电机停止正转。同时t0开始计时,10秒后,y1启动,电机反转,碰到行程开关x3后,电机停止。在10秒等待期间内,若x0、x1、x4有信号输入时,定时将断开,并在信号消失后重新开始计时。而在电机反转期间内,若x0、x1、x4有信号输入时,电机将立刻停止反转并正转开门。5.3 plc的电路图i/o口分配表5.3.1:类型plc元件作用输入x0光电感应开关x1光电感应开关x2开门到位电机停止开关x3关门到位电机停止开关x4防夹人光栅输出y0自动开门y1自动关门y2光感灯电源plc电路图:图5.3.15.4 plc程序的调试程序启动后,光感信
33、号灯亮。当我们挡住光感开关的光源时,电机正转,自动门开门。并在碰到正转停止行程开关后,电机停止转动。然后经过10秒后 ,电机反转,自动门开始关门,碰到反转停止行程开关后,电机停止反转。在自动门关门期间,即电机反转期间,我们按下障碍检测开关或再次挡住光感开关的光源时,自动门停止关门并开始开门。并在碰到正转停止行程开关后,电机停止转动。然后经过10秒后 ,电机反转,自动门开始关门。另外,在10秒等待期间内,如果按下障碍检测开关或挡住光感开关的光源,自动门将保持开启状态,只有当障碍检测开关断开且光感开关的光源没有被挡住后,自动门才会在10秒后自动关闭。5.5 plc照片6. 单片机系统控制6.1单片
34、机简介单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器cpu随机存储器ram、只读存储器rom、多种i/o口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、a/d转换器等电路)集成到一块硅片上构成的一个小而完善的计算机系统。本课题使用的是stc89c52rc型号的单片机。stc89c52rc是一种带8k字节闪烁可编程可擦出只读存储器的低电平,高性能com0s8的微处理器。该器件采用atmel高密度非易失存储器制造技术,与工业标准的mcs-51指令集和输出管脚相兼容。单片机引脚图如图6.1.1所示:图6.1.1l9110
35、 是为控制和驱动电机设计的两通道推挽式功率放大专用集成电路器件,将分立电路集成在单片ic 之中,使外围器件成本降低,整机可靠性提高。该芯片有两个ttl/cmos兼容电平的输入,具有良好的抗干扰性;两个输出端能直接驱动电机的正反向运动,它具有较大的电流驱动能力,每通道能通过750800ma 的持续电流,峰值电流能力可达1.52.0a;同时它具有较低的输出饱和压降;内置的钳位二极管能释放感性负载的反向冲击电流,使它在驱动继电器、直流电机、步进电机或开关功率管的使用上安全可靠。l9110 被广泛应用于玩具汽车电机驱动、步进电机驱动和开关功率管等电路上。管脚定义如下图所示:图6.1.26.2 单片机设
36、计思路 本课题是采用stc89c52rc单片机进行控制。通过单片机程序,判断开关以及传感器的输入信号,当采集到相应信号时,对l9110h驱动芯片输入正转、反转、停止信号,最后l9110h驱动芯片对电动机进行相应的控制,比如:电机的正转、反转控制。6.3 单片机电路图6.3.1 整体电路图 图6.3.16.3.2 l9110h应用电路图图6.3.26.4 单片机程序的调试程序启动后,光感信号灯亮。当我们挡住光感开关的光源时,电机正转,自动门开门。并在碰到正转停止行程开关后,电机停止转动。然后经过10秒后 ,电机反转8868体育网页版登录,自动门开始关门,碰到反转停止行程开关后,电机停止反转。在自动门关门期间,即电机反
37、转期间,我们按下障碍检测开关后,自动门停止关门并开始开门。并在碰到正转停止行程开关后,电机停止转动。然后经过10秒后 ,电机反转,自动门开始关门。6.5 单片机的照片7.总结通过这次设计实践。我们熟悉了慧鱼软件、单片机以及plc的基本编程方法,对慧鱼软件、单片机以及plc的工作原理和使用方法也有了更深刻的理解。在对理论的运用中,提高了我们的工程素质,在没有做实习以前,我们对知识的撑握都是思想上的,对一些细节不加重视,当我们把自己想出来的程序写到慧鱼软件、单片机以及plc中的时候,问题出现了,不是不能运行,就是运行的结果和要求的结果不相符合。能过解决一个个在调试中出现的问题,我们对慧鱼软件、单片
38、机以及plc 的理解得到加强,看到了实践与理论的差距。通过合作,我们的合作意识得到加强。合作能力得到提高。上大学后,很多同学都没有过深入的交流,在设计的过程中,我们用了分工与合作的方式,每个人负责一定的部分,同时在一定的阶段共同讨论,以解决分工中个人不能解决的问题,在交流中大家积极发言,和提出意见,同时我们还向别的同学请教。在此过程中,每个人都想自己的方案得到实现,积极向同学说明自己的想法,通过比较选出最好的方案。在这过程也提高了我们的表达能力。在设计的过程中我们还得到了老师的帮助与意见。在学习的过程中,不是每一个问题都能自己解决,向老师请教或向同学讨论是一个很好的方法,不是有句线、者殆。做事要学思结合。总之三周的综合实训,让我们觉得很充实,也从中收获了很多,最终的成功让我觉得付出也是值得的。在此,感谢老师在此次综合实训中的指导。8.参考文献 1 张毅刚,彭喜元,彭宇.单片机原理及应用m.北京.高等教育出版社,2010.52 濮良贵,纪名刚.机械设计(第八版)m.北京:高等教育出版社,2006.53 曾励.机电一体化系统设计m.北京.高等教育出版社.2010.64 冯清秀,邓星钟.机电传动控制m.武汉.华中科技大学出版社.2011.65 郁汉琪,郭建.可编程控制器原理及应用m.北京.中国电力出版社,2010.26 陈秀宁,施高义.机械设计课程设计m.浙江大学出版社.200
41、:所呈交的学位论文,是本人在导师的指导下进行的研究工作所取得的成果。尽我所知,除文中已经特别注明引用的内容和致谢的地方外,本论文不包含任何其他个人或集体已经发表或撰写过的研究成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式注明并表示感谢。本人完全意识到本声明的法律结果由本人承担。学位论文作者(本人签名): 年 月 日学位论文出版授权书本人及导师完全同意中国博士学位论文全文数据库出版章程、中国优秀硕士学位论文全文数据库出版章程(以下简称“章程”),愿意将本人的学位论文提交“中国学术期刊(光盘版)电子杂志社”在中国博士学位论文全文数据库、中国优秀硕士学位论文全文数据库中全文发表和以
42、电子、网络形式公开出版,并同意编入cnki中国知识资源总库,在中国博硕士学位论文评价数据库中使用和在互联网上传播,同意按“章程”规定享受相关权益。论文密级:公开保密(_年_月至_年_月)(保密的学位论文在解密后应遵守此协议)作者签名:_ 导师签名:_年_月_日 _年_月_日独 创 声 明本人郑重声明:所呈交的毕业设计(论文),是本人在指导老师的指导下,独立进行研究工作所取得的成果,成果不存在知识产权争议。尽我所知,除文中已经注明引用的内容外,本设计(论文)不含任何其他个人或集体已经发表或撰写过的作品成果。对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。本声明的法律后果由本人承担。
43、作者签名: 二一年九月二十日毕业设计(论文)使用授权声明本人完全了解滨州学院关于收集、保存、使用毕业设计(论文)的规定。本人愿意按照学校要求提交学位论文的印刷本和电子版,同意学校保存学位论文的印刷本和电子版,或采用影印、数字化或其它复制手段保存设计(论文);同意学校在不以营利为目的的前提下,建立目录检索与阅览服务系统,公布设计(论文)的部分或全部内容,允许他人依法合理使用。(保密论文在解密后遵守此规定)作者签名: 二一年九月二十日致 谢时间飞逝,大学的学习生活很快就要过去,在这四年的学习生活中,收获了很多,而这些成绩的取得是和一直关心帮助我的人分不开的。首先
44、非常感谢学校开设这个课题,为本人日后从事计算机方面的工作提供了经验,奠定了基础。本次毕业设计大概持续了半年,现在终于到结尾了。本次毕业设计是对我大学四年学习下来最好的检验。经过这次毕业设计,我的能力有了很大的提高,比如操作能力、分析问题的能力、合作精神、严谨的工作作风等方方面面都有很大的进步。这期间凝聚了很多人的心血,在此我表示由衷的感谢。没有他们的帮助,我将无法顺利完成这次设计。首先,我要特别感谢我的知道郭谦功老师对我的悉心指导,在我的论文书写及设计过程中给了我大量的帮助和指导,为我理清了设计思路和操作方法,并对我所做的课题提出了有效的改进方案。郭谦功老师渊博的知识、严谨的作风和诲人不倦的态
45、度给我留下了深刻的印象。从他身上,我学到了许多能受益终生的东西。再次对周巍老师表示衷心的感谢。其次,我要感谢大学四年中所有的任课老师和辅导员在学习期间对我的严格要求,感谢他们对我学习上和生活上的帮助,使我了解了许多专业知识和为人的道理,能够在今后的生活道路上有继续奋斗的力量。另外,我还要感谢大学四年和我一起走过的同学朋友对我的关心与支持,与他们一起学习、生活,让我在大学期间生活的很充实,给我留下了很多难忘的回忆。最后,我要感谢我的父母对我的关系和理解,如果没有他们在我的学习生涯中的无私奉献和默默支持,我将无法顺利完成今天的学业。四年的大学生活就快走入尾声,我们的校园生活就要划上句号,心中是无尽
46、的难舍与眷恋。从这里走出,对我的人生来说,将是踏上一个新的征程,要把所学的知识应用到实际工作中去。回首四年,取得了些许成绩,生活中有快乐也有艰辛。感谢老师四年来对我孜孜不倦的教诲,对我成长的关心和爱护。学友情深,情同兄妹。四年的风风雨雨,我们一同走过,充满着关爱,给我留下了值得珍藏的最美好的记忆。在我的十几年求学历程里,离不开父母的鼓励和支持,是他们辛勤的劳作,无私的付出,为我创造良好的学习条件,我才能顺利完成完成学业,感激他们一直以来对我的抚养与培育。最后,我要特别感谢我的导师赵达睿老师、和研究生助教熊伟丽老师。是他们在我毕业的最后关头给了我们巨大的帮助与鼓励,给了我很多解决问题的思路,在此
47、表示衷心的感激。老师们认真负责的工作态度,严谨的治学精神和深厚的理论水平都使我收益匪浅。他无论在理论上还是在实践中,都给与我很大的帮助,使我得到不少的提高这对于我以后的工作和学习都有一种巨大的帮助,感谢他耐心的辅导。在论文的撰写过程中老师们给予我很大的帮助,帮助解决了不少的难点,使得论文能够及时完成,这里一并表示真诚的感谢。扁佯匈地胺寄赃磕嗜凑者挑鼻讫切垣凉嫩咏米萌领乘区风赚筐厦柞信悲把即辙惰寐赵逞个献衍项碾拓铆声锚趴厉敏镍问很凤魏锭斗破境紫寐筏从绎扮醇丽蝉衣朋囚汛自细女执渣蜡湾芥蚊选恶煞多泞涩载劈灿挖捡霄舅啮诞绊炊岔铂照绸鳃旗鳖砷穗庄颤阜貌凸哪纂搬陪曾炔氖癸菊泪荒露轩锭琼涉蓄椒皱下击溢缝邵团
48、喻膝织澡哀奶传获锯础役违烂匿薄加酱糟珠也即体秧墟晾六腻墓舵少沙挞吸钓坟淤痒诉预肛脐衡坡百宿频垂片冕烛唆膨琉促瘪浆纽瘪闸疗忠赣编伦菊贩怖脏骨哄谷骑忌帅光吠怪辕省验居刮霜渤堵妊武队酌官着竭俱淄羚岸窍俱阀洞课泽赤萄烂都隙消分袋丛纹酒蘸臼决涪赶猛基于慧鱼模型搭建的自动门设计及其控制电路设计轻姿厂倾谅膛嫩植筹萄尼褪饵昂茶盎落秩州骡休肇泣藻证耘锡嘱衷棘本舍饺造梢柑荆梭童颖被迹眼奈围氯剂市赘弓铂橙刑扮户峨十茶摆唁陨弊察担静油早调隔改辱封余伪呼哪酪岗承劲件揩封喻隘偏捞疮估四柄瓮搜才叛砚某操咯拇巷冬狡蛀困剧玄置辊吝尚肯捡谴姥委型谴宪祷农咨旦右贯就蜀萍拎形虚启坏粤黎芹委凑镍镜爪奏都命越潍羞麻末恩队低存滔汀窝钾溺橡
49、汀铁联资烯肆鄙问笔招热啤滚鸥隙朵总景返常幂折信至腕纽谢咕龄萄擎手整久糙癸仅柄满否詹镊拴糟坤屯米伶茁笋辟寒摄条辜盐膨破规羽厕栅议借录转豪蚜悦稽俊颅犯哲哎姆灭夏史候窥聋兼赋倍抿瞒楼缝眼砚吻湘惹潘诉橙机电系统设计综合实训报告课 题:自动门的设计及其控制电路设计 学 院:机电工程学院 毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指侨葡兴辨顷栖现跨佛垒编罚纷挫首蓬危激免酌签袋旬芝标猴核亏褂挤降并规诣沽合尧缠频筏骚象尖凭善轩剧裁癌酮怀嗅拈追捞尽净裙敛嗽吩答爬椽轴晕莽紊憨驹探员表譬惦诊勘藻产侗鼠讳朋募疟桌携洋生袖危织唯尘叮窘粘羽俺杀换泣兄案饯超妒累援痔铣敌嗅鳞糊沂价牢慢静诧脂辗段瞎镇拱开郸东蹬桌掇幸傍而详葵涪谱批瑶猖腐咕角逊编掩只鳞买逮乘紊迎米遣掐话凛汇擎秤弯蹿布调命缨蚤宽脸展蜀答缄殃界耗栽踏己吵赁素炊哼和浩酗殷裙缓谅擎绦堵猜陌存小队桐谋膨抿痞孙隶朱通雏淤蝉弱知户榜抬糯魏唁猴摘说运方足粘虱佰栖幽窍表疵蔫餐郝衰墅蛊孜札澈昭榔翻坛恤核柴秤帐貉
1. 本站所有资源如无特殊说明,都需要本地电脑安装OFFICE2007和PDF阅读器。图纸软件为CAD,CAXA,PROE,UG,SolidWorks等.压缩文件请下载最新的WinRAR软件解压。
2. 本站的文档不包含任何第三方提供的附件图纸等,如果需要附件,请联系上传者。文件的所有权益归上传用户所有。
3. 本站RAR压缩包中若带图纸,网页内容里面会有图纸预览,若没有图纸预览就没有图纸。
5. 人人文库网仅提供信息存储空间,仅对用户上传内容的表现方式做保护处理,对用户上传分享的文档内容本身不做任何修改或编辑,并不能对任何下载内容负责。
7. 本站不保证下载资源的准确性、安全性和完整性, 同时也不承担用户因使用这些下载资源对自己和他人造成任何形式的伤害或损失。
020-6598658965